Corrections
To get millimeter accuracy the FPL must be provided with correction values. Corrections, often called RTCM or RTK corrections, help the GNSS receiver refine its position calculations. Corrections can be obtained from a variety of sources and are transported through different methods.
Correction Sources
The majority of users will subscribe to a correction service through a monthly subscription like PointPerfect or through a network provided by their state.
Correction sources fall into three general categories: Commercial, Public, and Civilian Reference Stations.
Commercial Reference Networks
These companies set up a large number of reference stations that cover entire regions and countries. They are often easy to use but require a monthly subscription.
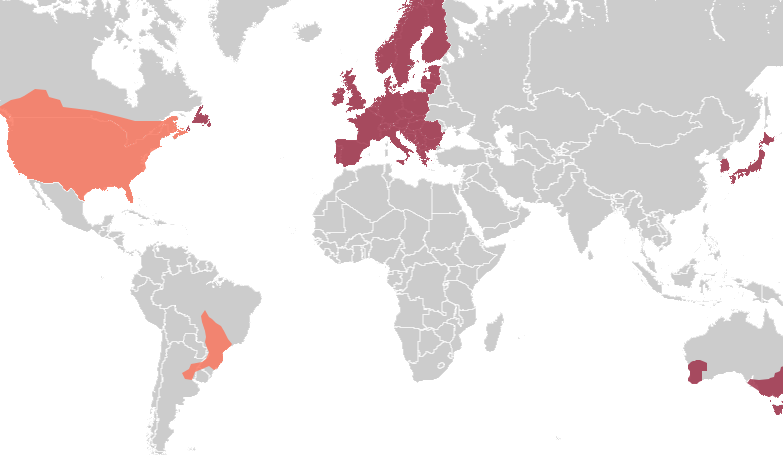
- PointPerfect ($15/month) - US, EU, as well as parts of Australia, Brazil, and South Korea. Note: This is an SSR service.
- Onocoy ($25/month) - US, EU, Australia, and many other partial areas
- PointOneNav ($150/month for "True RTK") - US, UK, EU, KOR, AUS, NZ, and JP
- Skylark ($29 to $69/month) - US, EU, Japan, Australia
- SensorCloud RTK ($100/month) partial US, EU
- Premium Positioning (~$315/month) partial EU
- KeyNetGPS ($375/month) North Eastern US
- Hexagon/Leica ($500/month) - partial US, EU
Public Reference Stations
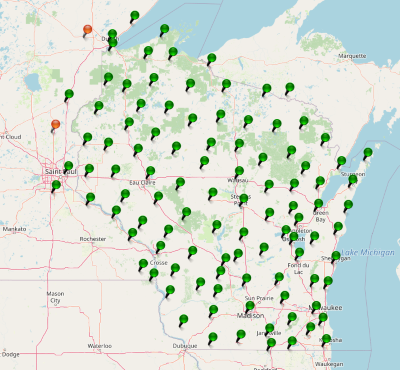
Be sure to check if your state or country provides corrections for free. Many do! Currently, there are 16 states in the USA that provide this for free as a department of transportation service. Search ‘Wisconsin CORS’ as an example. Similarly, in France, check out CentipedeRTK. There are several public networks across the globe. NTRIP-List is a good source but be sure to google around!
Civilian Reference Stations

You can set up your own correction source. This is done with a 2nd GNSS receiver that is stationary, called a Base Station. There is just the one-time upfront cost of the Base Station hardware. See the Creating a Permanent Base document for more information.
Galileo HAS
The European Union launched a free correction service called High Accuracy Service or HAS starting in 2023. The service is delivered over the E6 frequency. In general, this service will greatly improve accuracy to receivers but is lower accuracy than an OSR or SSR-based RTK Fix. These corrections require about 15 minutes for the PPP algorithm to converge on a solution that has better than 20cm (8 inches) of accuracy. The corrections are free, provided over the Galileo GNSS constellation, and have global coverage. If internet access is available at your worksite we still recommend using land-based corrections for much better accuracy and faster RTK Fix times. Consider HAS to be a slow but ok backup when there is no internet.
OSR vs SSR
Not all companies providing correction services use the same type of corrections. There are two types: OSR and SSR.
Observation Space Representation (OSR) is the classic type of corrections network. This is a collection of base stations located at regular intervals across a geographic area. Corrections coming from this type of network provide the highest RTK accuracy (14mm or less is common when located within 10km of a base station) with the minimum convergence time (the time you have to wait before the GNSS receiver can achieve RTK Fix). Normal convergence time for an OSR is a few seconds. However, because a CORS has to be placed every few 10km, these type of networks are expensive to install and maintain. An OSR network is prone to holes or gaps in the network where a base station is not sufficiently close to maintain RTK Fix. Imagine an autonomous semi-trailer truck driving across hundreds or thousands of miles; an OSR network is extremely difficult to set up that maintains the full coverage needed for highly kinetic applications.
PointOne Nav, and Skylark Nx RTK are examples of an OSR.
State Space Representation (SSR) covers huge areas, sometimes entire continents. SSR combines the readings from a handful of base stations and creates a model for the region. This model extrapolates the needed corrections for a given area. These corrections are 'good enough' for many applications. Because SSR requires far fewer base stations, they are often a much lower-cost service. The RTK Fix accuracy is lower (20mm is possible but 30-60mm is common), and the convergence time increases considerably. Convergence time for an SSR can be 180 seconds or more.
The PointPerfect and Skylark Cx are examples of an SSR.
Transport Methods
The majority of users will use their phone and send corrections from their GIS app's NTRIP Client, over Bluetooth, to the FPL.
Once a correction source is chosen, the correction data must be sent to the FPL. This section describes the various methods to move correction data into the FPL. These are sorted from most common to least.
RTK calculations require RTCM data to be delivered approximately once per second. The RTCM serial data is approximately 1000 bytes per second but varies depending on the GNSS receiver and its settings. If RTCM data is lost or not received by a rover, RTK Fix can still be maintained for around 30 seconds before the device will enter RTK Float mode. If a transport method experiences congestion (ie, cellular latency, Serial Radios dropping packets, etc) the rover(s) can continue in RTK Fix mode even if correction data is not available for multiple seconds.
Bluetooth
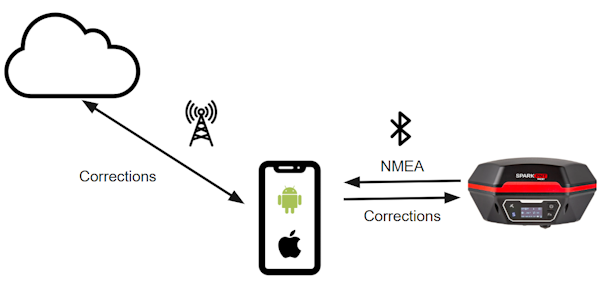
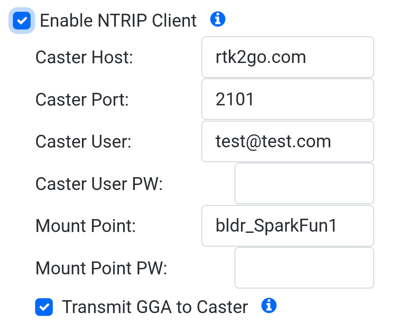
Using a cell phone is the most common way of transporting correction data from the internet to the FPL. This method uses the cell phone's built-in internet connection to obtain data from an NTRIP Caster and then pass those corrections over Bluetooth to the RTK device.
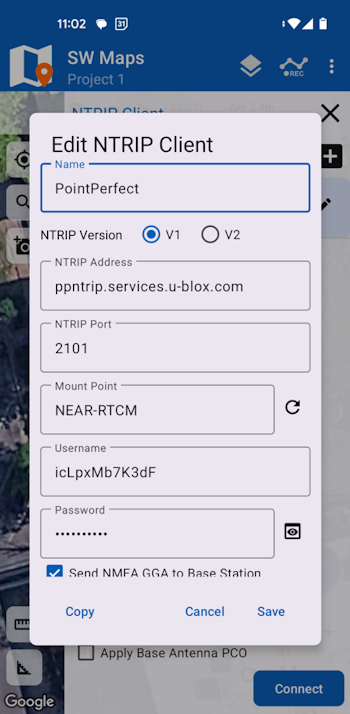
Shown above are SW Map's NTRIP Client Settings. Nearly all GIS applications have an NTRIP Client built in so we recommend leveraging the device you already own to save money. Additionally, a cell phone gives your rover incredible range: a rover can obtain RTCM corrections anywhere there is cellular coverage.
Cellular can even be used while the FPL is being used as a base. We have seen some very inventive users use an old cell phone as a WiFi access point. The base unit is configured as an NTRIP Server with the cellphone's WiFi AP credentials. The base connects to the WiFi, and the RTCM data is pushed over WiFi, then over cellular, to an NTRIP Caster.
WiFi
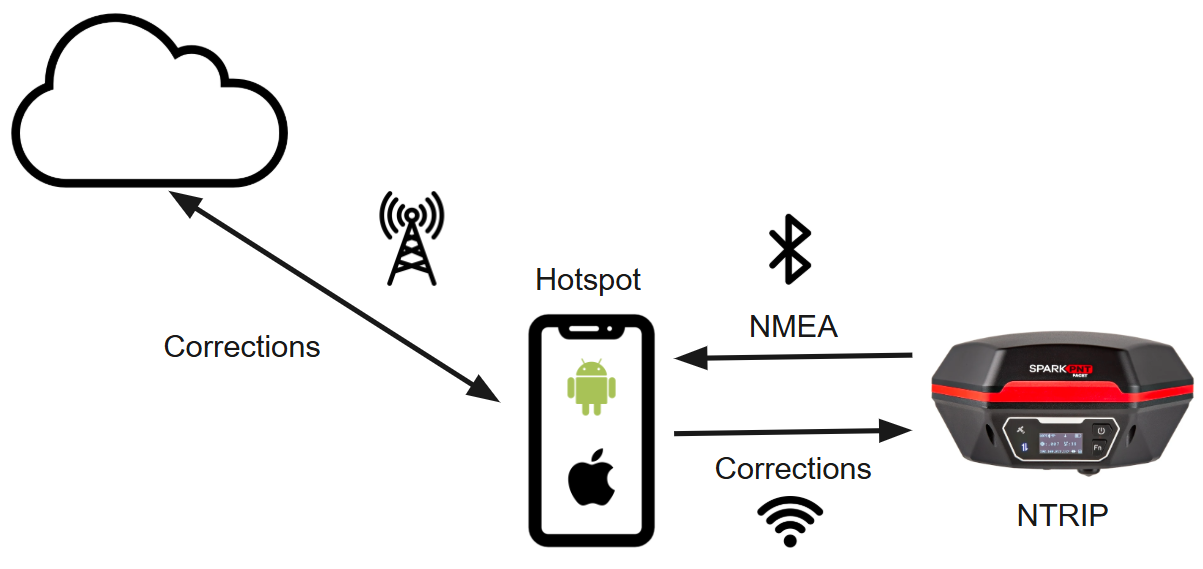
The FPL can connect to a WiFi network (usually a hotspot) and then use the FPL's built-in NTRIP Client to get corrections over WiFi. This set up is most often used when a GIS app does not have an NTRIP Client built into it. The cell phone is the connection to the internet, allows for incoming devices to connect over WiFi, and connects to the FPL over Bluetooth to obtain the highly accurate NMEA data.
NTRIP Client
An NTRIP Client is a method for getting corrections from the internet into the FPL. While most users will use a GIS app that has a built-in NTRIP Client, some applications do not. In that case, the FPL can be set up as an NTRIP Client. The RTK device will connect to a given WiFi network and begin downloading the RTCM data from the given NTRIP Caster. This is useful only if the Rover remains in RF range of a WiFi access point. Because of the limited range, we recommend using a cell phone's hotspot feature rather than a stationary WiFi access point for NTRIP Clients.
See NTRIP Client Configuration for setup specifics.
NTRIP Server
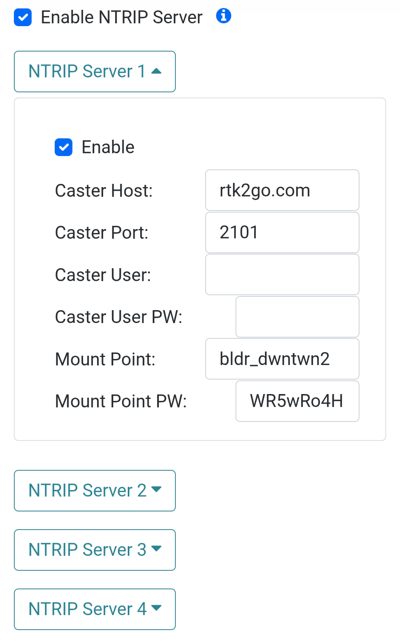
The FPL also has an NTRIP Server feature. This is most often used when the FPL is acting as a base. An NTRIP Server is a method for sending corrections from the FPL out to the internet. In this mode, the FPL will connect to WiFi and broadcast its correction data to the internet. The NTRIP Server connects to something called an NTRIP Caster. Any number of rovers can then access this data using their own NTRIP Clients.
Up to four NTRIP Servers can be entered. The FPL will attempt to connect to each server and send data. This is helpful if you wish to participate in networks that reward users for their data (i.e. Onocoy, Geodnet, etc.) while simultaneously broadcasting the correction data to a public network (i.e. RTK2Go, Emlid, etc.) for use as your own personal base.
See NTRIP Server Configuration for setup specifics.
LoRa
The FPL contains a 1 watt Long Range (LoRa) radio capable of transmitting RTCM from a single base to multiple rovers. See the LoRa Radio page for more information.
ESP-NOW
The FPL contains a 100 milliwatt radio capable of transmitting RTCM from a single base to multiple rovers. See the ESP-NOW Radio page for more information.
Remote Internet
What do you do if you need to get an RTK Fix but there is no internet service? How can users obtain corrections in remote areas? Space based internet providers such as Eutelsat KONNECT or Starlink Roam can be used to gain internet connectivity in remote areas to then connect to a standard NTRIP corrections source. Checkout our video on how we put Starlink in a briefcase and used its $5 standby service for NTRIP based corrections.
Post Processing
If real time kinematics is not needed, the FPL can log raw GNSS satellite data onto a microSD card where it can be post processed into very accurate location data.