Modes of Operation
The FPX-T functions in a variety of modes:
-
GNSS Positioning (~700mm accuracy) - also known as
Rover -
GNSS Positioning with RTK (8mm accuracy) - using a local base station
-
GNSS Positioning with PPP-RTK (14 to 60mm accuracy) - using PointPerfect corrections
-
GNSS Base Station
-
GNSS Base Station as NTRIP Server
-
To start recording surveying positions, simply open your preferred GIS app on any smartphone or tablet, pair the FPX-T as a BLE device, and access your NTRIP corrections service using the internet/cellular connection of your mobile device. With its MFi certification, users can now pair our SparkPNT devices with any Apple's iOS device!
- With Galileo HAS corrections enabled by default on the FPX-T, users don't even need an NTRIP correction service. Just wait 8-15 min. for the FPX-T to reach a convergence point in its position corrections, then begin recording positions with <20cm (<8") of precision. This option is great for remote locations with limited access to data, internet, or cellular services. While it is free and has global coverage, the performance of this PPP based service is limited by several factors.
-
The SparkPNT FPX-T can also operate as a base station, to broadcast RTK corrections and function as an NTRIP caster/server.
- In scenarios where only precision measurements are required and not the accuracy of the global position, users can setup their base station in a few minutes using our
Base Assistfunction. In this mode, the FPX-T averages a set of basic GNSS measurements to record its base station position before broadcasting RTK corrections. This option is great for recording precision measurements that only need to maintain accuracy relative to each other; and not their global position in reference to the Earth. For example, if you only need to survey the footprint of a building or intersection; or in situations where there are reference markers that can be used to adjust your measurements with post-processing. - For all other applications, where the accuracy of the global positions are critical, users have two options to setup their base station.
- Use a known, reference or survey mark to setup the base station.
- Survey-in the base, setup the base station and record positions over an extended period of time to determine its position. The accuracy of this, is directly correlated to the length of time spent during this process. For additional accuracy, the raw GNSS signal data can be recorded and submitted through a online PPP (Precise Point Position) post-processing service (NRCAN or OPUS)
- In scenarios where only precision measurements are required and not the accuracy of the global position, users can setup their base station in a few minutes using our
Rover
In Rover mode, the FPX-T will receive L1, L2, and L5 GNSS signals from the four constellations (GPS, GLONASS, Galileo, and BeiDou) and output the devices' position with accuracies around 700mm. The device will calculate the position based on the combination of GNSS and any correction signals (primarily SBAS, if available). Similar to a standard-grade GNSS receiver, the FPX-T will output industry standard NMEA sentences at 2Hz and can broadcast them to any paired Bluetooth® device. The end user will need to parse the NMEA sentences using commonly available mobile apps, GIS products, or embedded devices (there are many open source libraries).
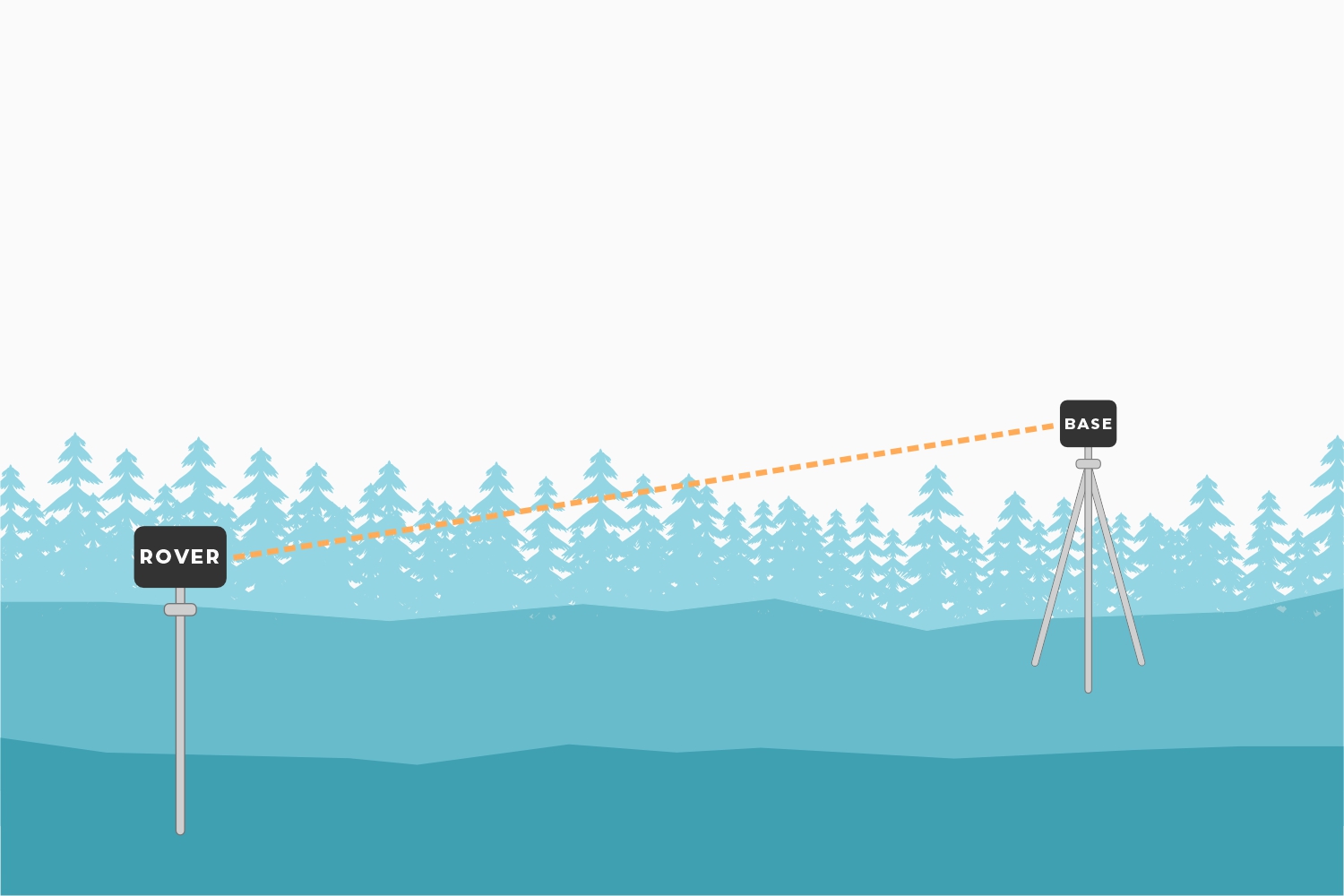
Rover with RTK
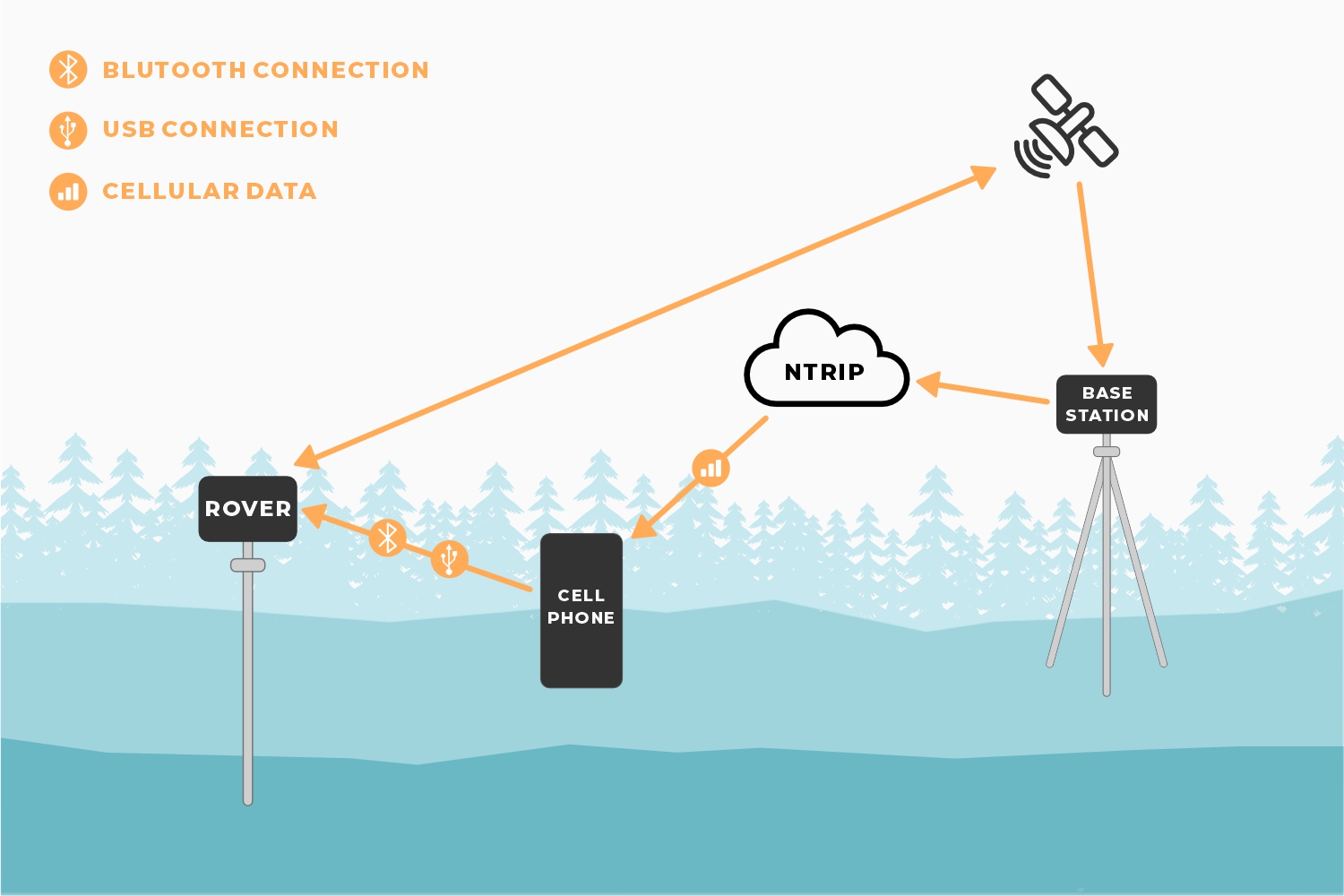
In Rover with RTK mode, the FPX-T will receive GNSS signals and combine them with RTCM correction data to achieve accuracy of approximately 8mm horizontal positional accuracy and 15mm vertical accuracy. The RTCM correction data is most easily obtained over a cellular connection to the Internet using a free app on your phone (see SW Maps or Lefebure NTRIP) and sent over Bluetooth®. Additionally, corrections can be obtained over WiFi, or ESP-NOW. Correction data can come from 2nd unit setup as a base station, from a free local base station, or from a paid service. See the Quick Start guide and the NTRIP Client for more information.
Rover with PPP-RTK
In Rover with PPP-RTK, the FPX-T will receive GNSS signals and combine them with correction data provided over an IP connection (usually a cell phone hotspot). The corrections are State Space Representation (SSR) based and are also known as PPP-RTK. These corrections are obtained from ublox's PointPerfect network. Time to RTK Fix can take up to 300 seconds and has 14 to 60mm horizontal positional accuracy.
Base Station
In Base Station mode the device is mounted to a fixed position (like a tripod or roof) and will initiate a survey. After 60 to 120 seconds the survey will complete and the FPX-T will begin transmitting RTCM correction data over the built in 2.4GHz radio (if ESP-NOW is enabled). A base is often used in conjunction with a second FPX-T unit (or RTK Facet, RTK Surveyor, Express, Express Plus, etc) set to Rover to obtain the 8mm accuracy. Said differently, the Base sits still and sends correction data to the Rover so that the Rover can output a really accurate position. The relative accuracy of this mode is 8mm base-to-rover but has higher (up to a meter) of absolute inaccuracy. See how to set up a permanent base to decrease the absolute inaccuracy.
Base Station with NTRIP
In Base Station with NTRIP the device will enter Base Station mode. If WiFi is available, and the NTRIP Server(s) is enabled, its corrections will be broadcast to up to four NTRIP casters and made available to any rover that also has internet access and is within 10-20km.